
This was a new iteration of the wheel hub and wheel design that we had for the URC NURover team, designed, prototyped, and manufactured entirely by me.
The main goals were to reduce weight, increase compliance (of the wheel), and increase rigidity and durability (of the hub). The previous design featured two bearings both to one side of the wheel, causing a large cantilever and putting a great deal of moment load on them, in addition, they have a noticeable amount of angular slop. Therefore, the goal was to have bearings on both sides of the wheel, which meant that the loads were mostly radial, reducing slop. I went through several iterations of the hub, initially with two large bearings, to increase rigidity, then reduce weight as it was too overbuilt.
The hub parts were made out of SLS Formlabs Nylon 11 Carbon Fiber, which has high strength but needed to be hollowed out significantly to reduce weight to a reasonable level.
The wheels were made of Formlabs SLS TPU 90A, and had to be printed in 3 segments to fit on the Fuse 1+ printer, after which they were welded together using a soldering iron, then superglue to the nylon hub. I explored multiple options to bond the wheel segments together, including solvent welding, but I found heat staking the spokes together, and stir welding the edges was the easiest and most effect way to permanently attach them.
https://grabcad.com/library/rover-new-wheel-bearing-hub-1



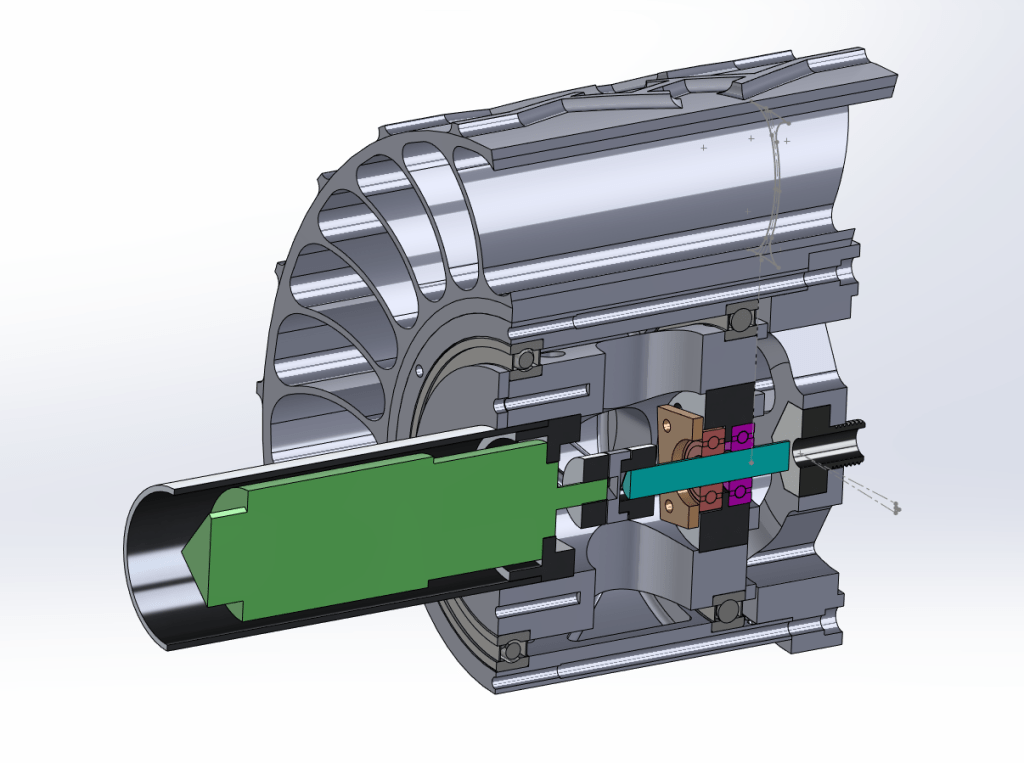
First hub iteration, featuring 2 bearings and bolts which bound the motor output to the inside of the wheel in addition to the spline

Version 2 of the hub, which got rid of the bolts but only used the spline for torque transfer. The final version would get rid of the second bearing (the small bearings are sufficient), and make the hub all one piece, as well as eliminating the internal aluminum part.
After several prototypes and signifigant iteration, the final design is still what we use on the rover today, and likely will be until we build a new system with larger wheels.
Going through the process of designing these wheels was very important to developing skills and techniques for designing for SLS 3D printing, largely the process of removing excess material as it prints entirely solid unlike traditional (FDM) 3D printing. One of the primary goals of this system was to optimize for weight, which I achieved through the multiple iterations which progressively removed components which proved unnessacary to the strength of the assembly.